戦車を製作して、ラズパイでリモートコントロールしてみた!
前回の記事(ラズパイでリモコンタンク製作準備!モーター制御成功!)、で、bluetoothを使用したリモートコントロールで、モー タを動かすことに成功しました。
いよいよ実際のリモコン戦車の稼働が現実的になってきました。
そこで、次は、実際に動かす戦車本体を製作します。
リモコン戦車といっても、本格的なものから簡易なものまでありますが、最初なので、キャタピラがついて動いているのが分かる簡易的な戦車もどきから始めてみます。
それでは、最後まで、ご一緒にお付き合いください。
戦車の足回りの製作
まずは、戦車の肝となる足回りから製作します。
ダブルギヤボックス
前進、後退及び右、左に旋回させる必要があるので、足回りには、タミヤのダブルギヤボックスを使用します。
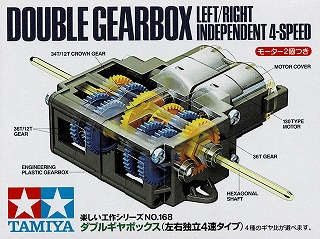
このダブルギヤボックス(左右独立4速タイプ)は田宮製で「楽しい工作シリーズ№168」に当たります。
これは、2つのモーターのパワーを別々に取り出すことができる組み立て式のギヤボックスです。
低速から高速まで4種類のギヤ比が選べ、左右でギヤ比が変えられる独立構造を採用しています。
ケースやギヤはプラスチック製、シャフトは丈夫な金属製です。
はめ込みやネジ止めでやさしく組み立てられ、なめらかな動きを生み出してくれます。
前回、テストで使用したモーターは、このダブルギヤボックスのものです。
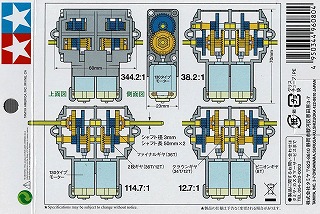
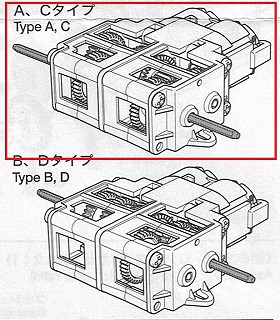
ギヤ比の選択
4つのギヤ比を選ぶことが出来ます。

余り早い速度は必要ないので、60爺はタイプCを選択しました。
設計図に従い組み立てを行います。それほど難しくはありません。
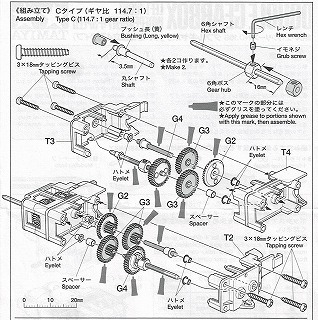



チャチャッと組み立てられました。
ただ、ギヤとシャフトにグリスを塗る必要がありまして、ギヤボックスに添付のものでは量的に不足?しているようなので、別途買い求めました。

そして完成です。

稼働テスト
モーターを組み込んだもので再度、稼働テストを行ってみました。
前身、後退、右、左とテストしてみましたが、シャフトの動きがわかるでしょうか?
戦車の組み立て
エンジン部の製作
戦車の本体は、こちらを使用しました。やはり、タミヤの「タンク工作基本セット」(楽しい工作シリーズ№108)です。
この工作キットにはギヤが付いていますが、このギヤは前進後退しかできません。
そのため、先ほどのダブルギヤボックスに変更して、左右転回ができるようにします。
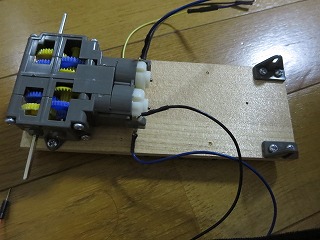
これで、エンジン部は完成ですね。
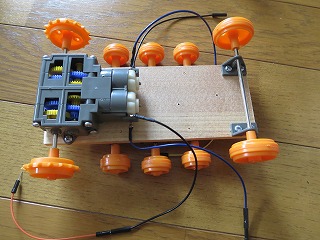
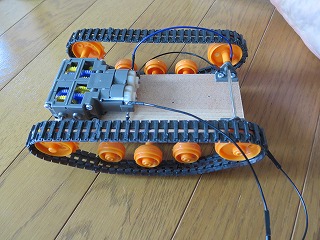
戦車足回り製作
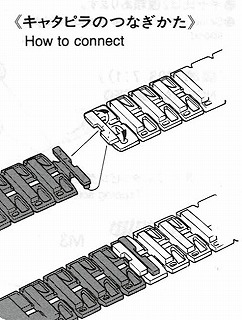
ホイールを取付けた後、キャタピラを連結(キャタピラのつなぎ方がちょっと面倒でした)して、これを取付けて戦車の足回りは完成です。

戦車のコントロール部の製作
さて、戦車の頭脳部分となる RaspberryPi zero WH 回りを戦車に搭載します。
そのためには、これらを載せる部分をエンジン部の上に作成する必要があります。60爺は、次のようにやってみました。
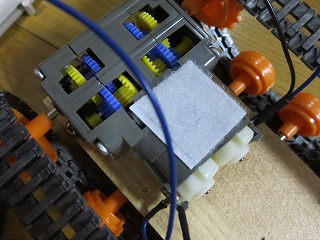
始めに、モータの部分にマジックテープを貼り、ユニバーサルプレートを載せます。
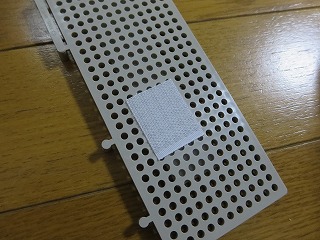
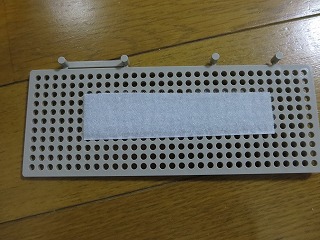
ユニバーサルプレートの逆面に、ブレッドボード用のマジックテープを取り付けます。
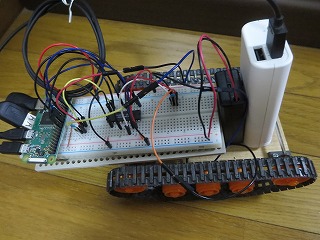
ブレッドボードの空いている空間に RaspberryPi zero WH を取り付けます。
戦車の後ろの方に、モバイルバッテリを貼り付けます。
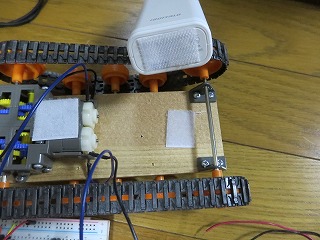
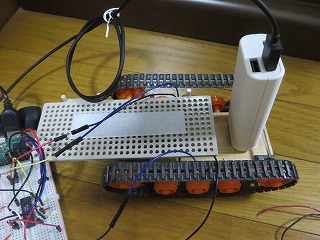
ブレッドボードと電池ボックスを置いて完成です。
ちょっと不格好ですが、まあ、良しとしましょう。
稼働
さあ、それでは、電源をセットして、前回のプログラムを動かしてみます。
少し動きが、ぎくしゃくしていますが、前進、後退、右旋回、左旋回しているのがわかるかと思います。
最後に
戦車本体を制作しました。
今回は、簡易なモノでいいやとタミヤの「タンク工作基本セット」で作成しました。
モバイルバッテリやzero WHを貼り付けたブレッドボードを基本セットに両面テープで張り付けたので、形は不格好です。
前回作成したプログラムを動かしたところ、どうにか稼働しました~。
■思えば「リモコンタンク」の記事も増えてきました。


60爺
60路を越え、RaspberryPi と出会い、その関係でブログ開設(2017/2~)となりました。始めてみると、コツコツやるのが性に合ってしまい、漢字の記事から家の補修・将棋・windows10関係・別名・言い方などジャンルを拡大して今に至ってます。まだまだ、元気なので新たな話題を見つけて皆様に提供できればと思っています。「プロフィールはこちら」