raspberypiを使用したリモートコントロールタンク関連の記事

えれェ小さなモータードライバーを使ってモーターを制御してみた
60爺は、プラレールをラズパイでコントロールしてみたいと考えています。 サイトをググると先 ...

大失敗!リモコンCAM-PROGRAM ROBOTにカメラを搭載しようとしたが…
前回の記事(WEBカメラで動画ストリーミングをやってみる)で、USBカメラから動画をブラウ ...

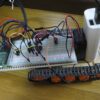
ラズパイを使ってCAM-PROGRAM ROBOTをリモコン化した
さて、TAMIYAの楽しい工作シリーズ「CAM-PROGRAM ROBOT」をモータードラ ...

TAMIYAのロボット工作キットをラズパイで制御する!実践編
それでは、CAM-PROGRAM ROBOT を製作しましょう。 設計図に従って作成すれば ...

TAMIYAのロボット工作キットをラズパイで制御する!準備編
モータードライバNJM2070D2(ラズパイでリモコンタンク製作準備!モーター制御成功!) ...

ラズパイ戦車をスマホからコントロール!見事に動かすことが出来た
前回の記事で、WebIOpiを用いてLチカを行ってみました。確かに、スマホからボタンをクリ ...

スマホから戦車を動かす!準備編/WebIOpiセットアップ
前回の記事(⇒こちらをどうぞ)では、bluetoothを使用して製作した簡易的な戦車の稼働 ...
戦車を製作して、ラズパイでリモートコントロールしてみた!
前回の記事(ラズパイでリモコンタンク製作準備!モーター制御成功!)、で、bluetooth ...

ラズパイでリモコンタンク製作準備!モーター制御成功!
先日、raspberrypi3 と raspberrypi zero WH を bluet ...

bluetooth 通信でリモコン操作 pi3 と zero WH で通信を行う
raspberrypi3で色々遊んできたわけですが、そろそろ、新しいことに挑戦してみたくな ...